


问题描述
对每个顶点 ,求最短距离 (从 到 的最小路径长度)及其前驱。
算法思想
每次把“当前估计距离最小”的未确定顶点“封口”(settle),用它去松弛邻边;由于边非负,被封口的点已经“没法再更短”了。
输入:有向图
输出:从 到每个顶点的最短路径。
算法:
初始化 ;
对于 ,计算从 到 的相对 的最短路,长度 ;
选择 ,将 加入 并更新 中顶点的 ;
重复上述过程,直到 .
正确性证明
记
:到的真实最短路长度。
:当前算法中对 的估计。
:已“封口”的顶点集合(从队列里弹出、确定了的点)。
不变式(每次从优先队列取最小 的点 加入 前后都成立):
对所有 ,有 (已确定的距离是真的)。
对所有 , 等于“内部点都在 的从 到 的最短路”的长度;因此 。
初始化:,其余 ,。显然成立。
保持性:
假设不变量在本轮之前成立。令 为队列中 最小者,本轮把 加入 。要证 。
取从 到 的一条真正最短路,令 为该路上第一个不在的点, 为其前驱(在 )。
由不变式 1) 知 。在 被“封口”时我们松弛了,得到:
因边非负,。
而队列里 是最小的,所以 。
故我们得到:
同时结合 ,有
即加入后不变式 1) 继续成立;松弛 的出边只会把外部顶点的“内部在 的最短路”更新为更短,故 2) 也保持。
终止:队列空或所有可达点都封口时,所有可达顶点 满足 。证毕。
要点:非负权保证“先确定的不会被后面更短的边翻盘”。
伪代码
# 输入:邻接表 G[u] = [(v, w), ...],边权 w >= 0,源点 s
def dijkstra(G, s):
for v in G: # 初始化
d[v] = +∞
parent[v] = None
d[s] = 0
# 小根堆里放 (当前估计距离, 顶点)
heap = [(0, s)]
settled = set()
while heap:
du, u = heappop(heap)
if u in settled: # 惰性删除:跳过过期条目
continue
settled.add(u)
for v, w in G[u]: # 松弛 u 的每条出边
if v in settled:
continue
if d[v] > du + w:
d[v] = du + w
parent[v] = u
heappush(heap, (d[v], v))
return d, parent # d[v]=∞ 表示 v 不可达
时间复杂度
设
用二叉堆:每条边最多触发一次成功松弛并向堆里推一次,代价 ;再加上最多 次弹出最小。总体(适合稀疏图)
若用邻接矩阵 + 线性扫描找最小:每轮找最小 ,共 轮,外加松弛 ,总体 (适合稠密图)。
前提限制:若存在负权边,Dijkstra 可能错误;应改用 Bellman–Ford 或 Johnson 重赋权后再跑 Dijkstra。
例题
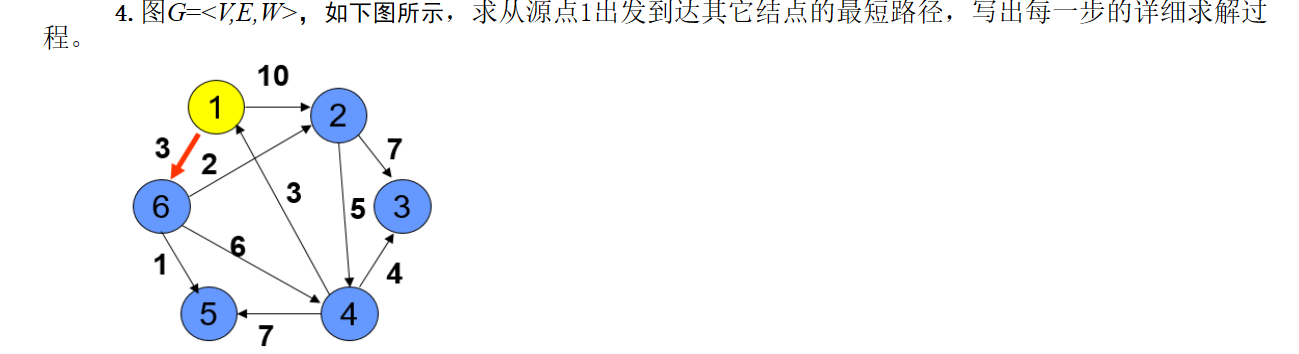
构造邻接表
1→2(10), 1→6(3)
2→3(7), 2→4(5)
4→1(3), 4→3(4), 4→5(7)
6→2(2), 6→4(6), 6→5(1)
从源点 1 用 Dijkstra,逐步把“当前距离最小”的点加入集合 并松弛它的出边。记录 与前驱 。
初始化
dist[1]=0;其它dist=∞;prev[*]=None
为方便阅读,下方用向量顺序 [1,2,3,4,5,6] 展示 dist,并列出本步选取的顶点与松弛更新。
步骤1:选 1(最小),加入 S
松弛 1→2:
dist[2] = min(∞, 0+10) = 10,prev[2]=1松弛 1→6:
dist[6] = min(∞, 0+3) = 3,prev[6]=1dist = [0,10,∞,∞,∞,3],
步骤2:选 6(当前最小3),加入 S
6→2:
dist[2] = min(10, 3+2) = 5,prev[2]=6(更新)6→4:
dist[4] = min(∞, 3+6) = 9,prev[4]=66→5:
dist[5] = min(∞, 3+1) = 4,prev[5]=6dist = [0,5,∞,9,4,3],
步骤3:选 5(4),加入 S
5 无出边,
dist不变dist = [0,5,∞,9,4,3],
步骤4:选 2(5),加入 S
2→3:
dist[3] = min(∞, 5+7) = 12,prev[3]=22→4:
dist[4] = min(9, 5+5=10) = 9(不变)dist = [0,5,12,9,4,3],
步骤5:选 4(9),加入 S
4→1:
dist[1] = min(0, 9+3=12) = 0(不变)4→3:
dist[3] = min(12, 9+4=13) = 12(不变)4→5:
dist[5] = min(4, 9+7=16) = 4(不变)dist = [0,5,12,9,4,3],
步骤6:选 3(12),加入 S;3 无出边
结束。
dist = [0,5,12,9,4,3],
最终最短距离与路径(由 prev 回溯)
到 1:距离 0,路径
1到 6:距离 3,路径
1 → 6到 5:距离 4,路径
1 → 6 → 5到 2:距离 5,路径
1 → 6 → 2到 4:距离 9,路径
1 → 6 → 4到 3:距离 12,路径
1 → 6 → 2 → 3
迪杰斯特拉算法
本文采用 CC BY-NC-SA 4.0 许可协议,转载请注明出处。
评论交流
欢迎留下你的想法